közlekedébiztonság
A gépeket is emberek tervezik
2016.11.02.
A biztonságos közlekedés megteremtése érdekében tett eddigi lépések alapján egyértelműnek látszik, hogy a célhoz vezető utat a benne résztvevő szereplők közül a leggyengébb láncszem szerepének a csökkentése, vagy teljes kizárása jelenti. A közlekedés leggyengébb láncszeme maga az ember, ugyanakkor az ő döntéseinek a kizárásához mások előzetes munkájára van szükség. Az önvezető funkciókkal, illetve a teljesen önvezető autókkal nem csak az autógyártók, hanem több, tőlük független cég is foglalkozik. Egy hazai start-up is közéjük tartozik, aminek szakemberével, Takács Árpáddal beszélgettem az ember szerepéről a jövő közlekedésben.

Az Adasworks nem rendelkezik több évtizedes jármű- és közlekedésbiztonsági tapasztalattal, korábban semmi ilyen jellegű tevékenységet nem folytatott, viszont egészen rövid idő alatt nagy ismertségre tett szert ebben a szektorban is. Mi volt a kezdet?
Az Adasworks valóban nem régi cég, 2015 júliusában alakult. Alapítója, Kishonti László viszont már régóta foglakozik informatikával, a Kishonti Kft. 2003-ba kezdte meg működését és elsősorban chip-ek tesztelésével foglakozott. Ennek során ismerte fel, hogy a jövőben a grafikus chip-eknek, és ezen keresztül az előzetes tesztelésüknek óriási szerepe lesz a jövőben. Az évek során kialakult üzleti- és kapcsolatrendszeren keresztül az Nvidia-tól érkezett egy megkeresés annak a vizsgálatára, hogy vajon egyetlen chip-pel megoldható-e egy autó teljes körű irányítása. Ebben egy másik partnerünkkel, a ThyssenKrupp Presta-val működtünk együtt, és így született meg az a demo autó, aminek két kört kellett megtennie a Hungaroringen. Ez volt az a bemutató, amin a világon először egyetlen beágyazott chip vezérelte egy autó önvezető funkcióit.
A bemutató sikeres volt, mi lett a következménye?
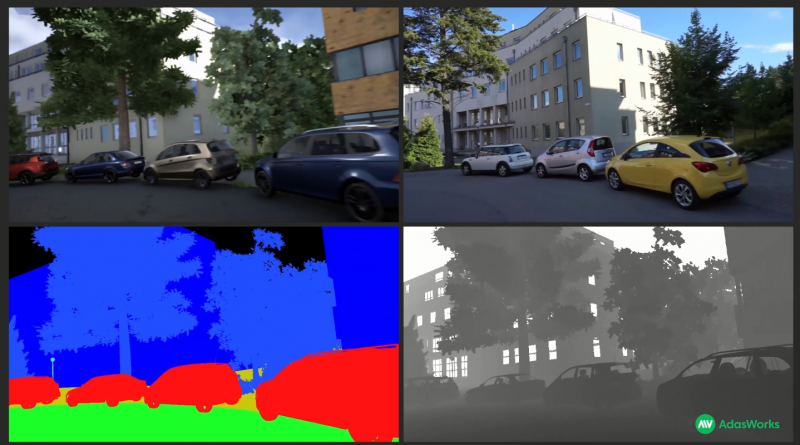
A további kutatásainkhoz és fejlesztéseinkhez elengedhetetlen volt küldő tőke bevonása, hiszen akkor 15 főből állt a cég létszáma, ma pedig már a 100-at is meghaladja. A sikeres bemutató ebben jelentett nagy lökést, tudtunk befektetőket találni. A létszámbővülés lehetővé tette, hogy egy új irányba, a kamera alapú objektum felismerés felé lépjünk tovább. Sok képfeldolgozásban, illetve mesterséges intelligenciakutatásban jártas mérnökkel bővült a csapat, akik azon dolgoztak, hogyan lehet egyetlen kamerakép alapján felismerni, megkülönböztetni, osztályozni az egyes objektumokat, mint pl. autók, gyalogosok, kerékpárosok, stb., valós időben. A feladatot nehezítette, hogy a lehető legkisebb hardware igénnyel kell a problémát megoldani, hiszen egy autóba kell mindezt beépíteni, és a felhasznált energia mennyiség sem közömbös. A cég fejlődése 2016 elején tette lehetővé, hogy ne csak a képfeldolgozással, hanem az önvezetést lehetővé tevő, teljes software-es keretrendszerrel is foglalkozzon. Innentől kezdve az elsősorban kamera, de más szenzorok alapján történő felismerést, 3D elhelyezést, helyzetfelismerést, ezek alapján a mesterséges intelligencia alapú döntéshozatalt, és az autó ma is meglevő rendszerinek vezérlését házon belül tudjuk kutatni és fejleszteni.

Milyen szakterületen dolgozó mérnökök szükségesek mindehhez?
Elsősorban mesterséges intelligenciakutatók, számítógépes „látással” foglalkozók, természetesen software és hardware fejlesztők, autóipari- jármű mérnökök, valamint minőségbiztosítással, biztonsággal, validációval is többen foglalkoznak.
Milyen nem várt kihívásokkal, problémákkal találkoztak eddig a tesztelések során, olyanokra gondolok, amik az előzetes tervezés során nem is merültek fel?
Ugyan ismert, de óriási kihívás pl. a mesterséges intelligencia alapú, neurális hálókkal támogatott, objektumfelismerés. A tudomány csak néhány éve jutott el odáig, hogy a párhuzamos programozást, mint módszert a gyakorlatban is alkalmazza. Szinte naponta jelennek meg tudományos cikkek arról, hogy milyen neurális háló architektúrát lehet alkalmazni az objektumok, pl. gyalogosok felismerése során.
Az önvezető autókkal kapcsolatos jogi szabályozás ma még gyakorlatilag semmilyen, így ennek kialakítás is – részben – azokra hárul, akik ezzel a gyakorlatban foglalkoznak. Nem csak a távolabbi jövő szabályrendszerére gondolok, hanem pl. a tesztelési környezetre is, ami nagyon is, szó szerint is mai probléma. Mi is csak zárt területeken, repülőtereken tudunk tesztelni, ami távol áll a valós, városon kívüli, vagy akár urbánus környezettől.
Az önvezető autó viszonylag egyszerűen hangzik, ugyanakkor rengeteg alrendszer párhuzamos és szoros együttműködése szükséges hozzá, amelyek mindegyike külön szakterület. Az ezekhez megfelelően értő, de az együttműködésre is képes szakemberek megtalálása is a komoly kihívást jelentő feladataink közé tartozik.
![]()
Az Adasworks melyik módszert alkalmazza az egyik legbonyolultabb emberi tulajdonság, a térlátás reprodukálására?
Többféle módszer létezik erre, a Tesla a radarokat, a Google a lézeres radarokat (Lidar) preferálja, mi pedig a kameraképet. Egy alkalmazásunkban például ezt 6 db kamerával oldjuk meg, amiből adódik, hogy ezek között viszonylag nagy az átfedés, és így – az emberi szemekhez hasonlóan – máris rendelkezésre áll a sztereólátás képessége. Ez a kamerák felbontásától, minőségétől függően az emberi, 15-20 méterig terjedő pontos térlátáson is túl „láthat”, és ott vannak mellette a radarok is, amik tovább tudják pontosítani a „képet”. A kettő közül a Lidar nagyon drága és a felbontása sem a legjobb, így hagyományos radar jelentheti erre a rövid- és középtávú megoldást. Hátránya, hogy pl. a fák között tekerő kerékpárost nem tudja felismerni.
A kép- és ezen keresztül a pillanatnyi helyzet felismerése tehát már megoldott, de mi a helyzet a „jövőbe látás” emberi tulajdonságával, azaz a többi közlekedő korábbi mozgásából és pillanatnyi helyzetéből tudjuk, hogy nagy valószínűséggel mit fog tenni a következő pillanatban?
A viselkedéskutatás, és a viselkedési mintákon alapuló döntéshozatal már sokkal összetettebb kérdés. Ez jóval nagyobb, több fejlesztési munkát és számítási kapacitást igényel, mint a képek alapján történő objektum felismerés. Némi könnyebbség a dologban, hogy az önvezető autók reakcióideje nagyságrenddel jobb lesz, mint az embereké, így az előrejelzésnek nem kell olyan hosszútávúnak lennie. A hosszú táv alatt is töredék, vagy maximum pár egész másodpercnyi időt kell érteni. Hozzá kell tegyem, hogy ez a jelenlegi elképzelés, annak fényében, hogy az önvezetés először a zártabb közegekben, pl. autópályákon fog megvalósulni, ahol kevesebb ismeretlenre, váratlanra kell felkészíteni a gépet.
Az önvezető funkciók fejlesztése során mennyire lehet szimulációra támaszkodni, vagy mennyire szükségesek a valódi, térbeli, fizikai tesztek?
Ma már nagyon sok mindent nagyon jól lehet virtuális környezetben is tesztelni, de egy kép alapú, képfeldolgozáson alapuló rendszer esetében először a grafikus felületet kell teljesen valósághűre megteremteni. Jelen esetben arra is gondolok, hogy pl. a nap csillogásának is teljesen valóséghűnek kell lennie, hiszen a kamerát a valóságban is megzavarhatja egy ilyen jelenség, és ennek az elkerülésére csak akkor lehet felkészülni szimuláció során, ha az tényleg valóságos.
A neurális hálók alkalmazása során a tanítás az a folyamat, amiben a szimulációnak nagy szerepe lehet. Ma úgy történik ez, hogy elkészül egy kép egy adott szituációról – és ilyenből másodpercenként legalább 25 készül, de most elég csak eggyel foglalkozni -, és ezen az erre szakosodott ázsiai cégek néhány centért darabonként bejelölik, mi a másik autó, melyik objektum a gyalogos, kerékpáros, stb. Ennek a folyamatnak a felgyorsítása és hatékonyabbá tételében lehet nagy segítség a szimulátor.
Az önvezető autók sokak számára még nagyon idegenek, távoliak. Azért, hogy egy kicsit közelebb kerüljenek az emberhez, néhány közismertebb mértékegységben kifejezett adatra is kíváncsi vagyok. Ma, a digitális fényképezők és mobiltelefonok korában a megapixel kifejezést mindenki használja és remélhetőleg érti is, ahogy a HD-t, vagy a 4K-t a tv-k esetében. Mekkora felbontású kamerákra van szükség az önvezető autókban?
Az eddigi fejlesztések azt mutatják, hogy a 2-3 megapixel elegendő. Ebben van annyi információ, amivel lehet dolgozni, ugyanakkor nem keletkezik feleslegesen nagy adatmennyiség. De nem is a felbontás a legfontosabb, hanem a kamerák minősége. Nem mindegy, mennyire torzítja a képet, milyen a mélységélességük, vagy a dinamikus kontrasztjuk. Az emberi szem nagyon gyorsan alkalmazkodik a fényviszonyok változásához, míg mindenki találkozott már olyan fényképpel, aminek az egyik fele „kiégett”, a másik pedig sötét volt. Ezt az önvezető autók esetében el kell kerülni.
Sok baleset következik be rossz látási körülmények között. A technika viszont „láthat” ilyenkor is, csak az emberi szemmel látható fénytartományban gondolkodik az Adasworks, vagy pl. infra tartományban is?
Minden lehetőséget ki kell használni, ami rendelkezésre áll, ugyanakkor az olyan kamerák, amik több tartományban is működnek, ma még nagyon drágák. Másrészt külön kell feldolgozni a normál és az infra képeket, ami az ilyen irányú kapacitásokra is hatást gyakorol, de nem titok, folytatunk ilyen irányú kutatásokat is.
A különböző autógyártóktól érkező hírek megegyeznek abban, hogy nagyjából a 2020-as évek elejére, közepére teszik az önvezető autók megjelenését. Mi az Adasworks, mint az ilyen rendszerek beszállítójának a prognózisa ezzel kapcsolatban?
A kérdés megválaszolásához először az önvezető funkció pontos definiálása szükséges. Az amerikai NHSTA (National Highway Traffic Safety Administration) öt, az SAE (Society of Automotive Engineers) hat különböző szintet állapított meg az autók önvezető funkcióinak besorolására. A 0. szint az, ami a közel és távolabbi múlt autóit jelenti, amikben semmilyen aktív vezetőt segítő funkció sincs. A tolatóradarok már a 0. és az 1. szint között vannak, ezek plusz információval látják el a vezetőt. Az 1-es és 2-es szint között vannak a sávtartó és aktív sebességszabályzó rendszerek, amik a vezető aktív felügyelete mellett már valamilyen szinten beavatkoznak az autó mozgásába. A Tesla Autopilot rendszere, ami már képes a sávváltásra, vagy az automata be- és kiparkoló rendszerek jelentik a 2. szintet, itt tartunk ma. A további két szintből a következő, a 3., amiben csak vészhelyzetben veszi át az ember az irányítást, addig már mindenre képes önállóana jármű. Ez lehet az, aminek a megjelenését 5-7 éven belülire teszik az autógyártók. A 4 - 5. szinten pedig akár a pedálokra, kormánykerékre sincs szükség, jogosítvány sem kell az ilyen autókkal történő utazáshoz. Erre autópálya körülmények között minimum 10, városi környezetben akár 20-25 évet is várni kell még. Ennek a megvalósulásához nem csak technológiai, hanem jogi és etikai oldalról is időre van még szükség.
- A hozzászóláshoz be kell jelentkezni

További cikkeink a témában
Az oldal fő támogatója
![]()










