önvezetés
Érzékelők, szenzorok 4. rész – Úton az önvezetés felé
2021.06.25.
Sok mindent tisztáztunk már a Volkswagen támogatásával készülő új, a járművek szenzoraival foglalkozó sorozatunkban: a fény- és esőszenzorokat, a parkolást segítő rendszerek érzékelőit és legutóbb a holttér felügyelet radarjait.
Utóbbi rendszer által használt érzékelők, a radarok, amik 24 GHz-es frekvencián működnek és „látótávolságuk” 70-80 méter. De nem csak a jármű hátsó fertáján használnak radarokat, ma már előre is jut belőlük.
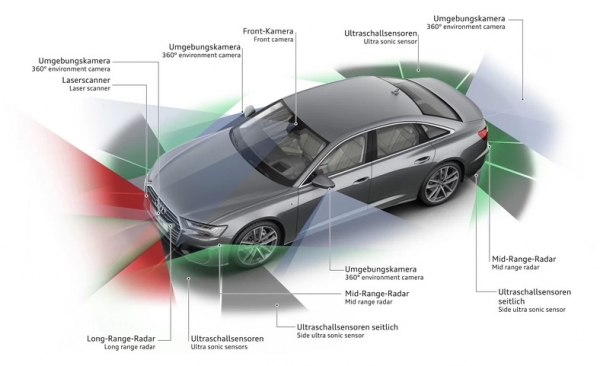
Nem csak a jövőbeli önvezető autók, hanem már a jelenleg forgalomban lévő járművek is rendelkeznek radarokkal. A magyar nyelvben a radar sokszor, mint gyűjtőnév szerepel és ezt használjuk mindenre, ami objektumokat képes észlelni valamilyen távolságban. A korszerű autók önvezető képességeinek elérésére a radarok mellett a jármű elején többször úgy nevezett lidart is találhatunk, de mi is az a Lidar?
Lidar
Mielőtt belevágnánk tegyük tisztába, hogy a „radar” nem egy átvett szó, hanem a Radio Detection and Ranging angol kifejezésből kreált mozaikszó. Jelentése szabadfordításban rádióhullám alapú távolságérzékelés.
1960-ban azonban feltalálták azt az érzékelőt, amely nem hang, hanem fényhullámok kibocsátásán és visszaverődésén alapul. A „radio” szót „light”-ra, vagy is fény-re cserélve a Light Detection and Ranging kifejezésből alakult a LIDAR.
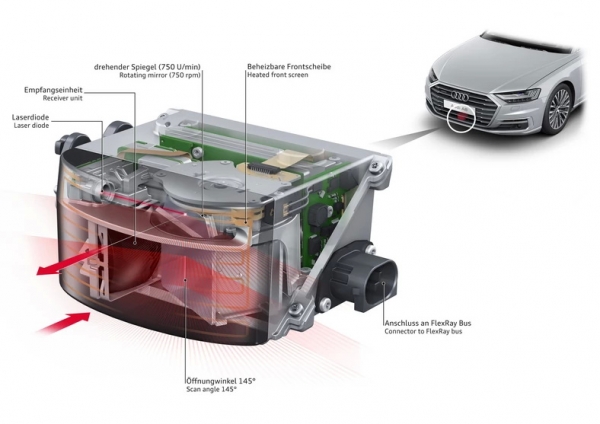
A fényt egy lézernyaláb jelenti, ennek előállítása nem jelent nagy kihívást. Azonban a lézeres érzékelés működése eltérő a radarokétól. A lidarnak ugyanis forognia kell, hiszen így tud csak körülnézni. Óriási előnye, hogy a fénysebesség miatt az érzékelés sokkal gyorsabb, mint a radaroknál, ráadásul pontosabb is. A lidar pontossága tette lehetővé először, hogy a járművek képesek legyenek az érzékelt objektumok felismerésére, az első gyalogosfelismerő rendszerek is lidart használtak.
Hátránya azonban éppen a forgómozgásból adódik, hiszen a jármű állandóan ki van téve dinamikus igénybevételnek, ha másért nem, hát az úthibák miatt. A precíz csapágyazás ezt a fajta igénybevételt nem sokáig tudja elviselni és az érzékelő tönkremegy, vagy pontossága jelentősen csökken.

Emiatt, bár viszonylag sor lidart használó jármű fut ma is az utakon, az iparág a mozgó alkatrészeket nem tartalmazó radarok fejlesztésére koncentrál, így a lidar várhatóan teljesen eltűnik majd a járművekből. Manapság már a gyalogos-kerékpáros-személyautó-teherautó megkülönböztetésére is képesek az olcsóbban előállítható és üzemeltethető radarok.
A végső cél a teljes önvezetés
Nem kérdés, a XXI. század legnagyobb járműtechnológia vívmánya az önvezetés. A lehetőségeket ismerve általában 5 szintre szokták felosztani a fejlődés várható szakaszait. Ezt az 5 szintet a SAE (Society of Automotive Engineers – Járműmérnöki Egyesület, USA) a következőképpen definiálta:
0. szint: amikor nincs semmilyen önvezetési funkció
1. szint: kormányzási vagy fékezési támogatást nyújtó rendszerek
2. szint: együttes kormányzási és fékezési támogatást nyújtó rendszerek
Az első három (1+2) szinten minden esetben a sofőrnek kell vezetnie, még akkor is, ha látszólag automata vezetés működik. A vezető folyamatosan felügyeli a rendszerek működését és készen áll arra, hogy bármikor beavatkozzon, vagyis az irányítást felülbírálva átvegye a vezetést. A jogi környezet néhány kivétellel világszerte jelenleg a 2. szintet engedélyezi, a járműgyártók is ezt szolgáltatják.

3. szint: bizonyos feltételek teljesülése esetén a rendszer aktív. A sofőrnek a rendszer utasítására kell átvennie az irányítást. Korlátozott feltételek esetén működik, mint például gyorsforgalmi útszakaszok, araszolás sűrű forgalomban.
4. szint: Ettől a szinttől nem lesz szükség sofőrre, nem feltétel a kezelőszervek (kormány és pedálok) megléte sem. A rendszer működési korlátjait az infrastruktúra megléte, illetve hiánya jelenti, ezért ez a szint egy erre felkészített városban vagy városrészben, autópálya szakaszon képzelhető el.
5. szint: A teljes önvezetés szintje, a rendszer minden körülmények között képes az önvezetésre.
Mi kell még?
Láttuk, hogy az eddig bemutatott eszközökkel, az ultrahangos szenzorokkal, a radarokkal és lidarokkal a járművek már elég jól érzékelik környezetüket, de ez még nem elég az önvezetéshez. Ahhoz, hogy idővel teljes biztonsággal működhessenek ezek a rendszerek, szükség van még a kamerák és éjjellátók alkalmazására is, ezekről sorozatunk további részeiben szólunk majd.
További autós tartalmakért kövesse az Autószektor Facebook oldalát!
- A hozzászóláshoz be kell jelentkezni

További cikkeink a témában
Az oldal fő támogatója
![]()












